こんな風に作ってます
電動カーテンコントローラ(4号機) 〜
製作の進め方(3)
(追加装備)
上のページへ
前へ |
1 | 2 |
3
製作の進め方(つづき)
ここからは組込プログラムの作業の進め方をおおざっぱに説明します。
PICマイコンメーカーのマイクロチップテクノロジー社が無償で提供している統合開発環境MPLAB
IDEを起動してエディタでCソースプログラムを記述します。
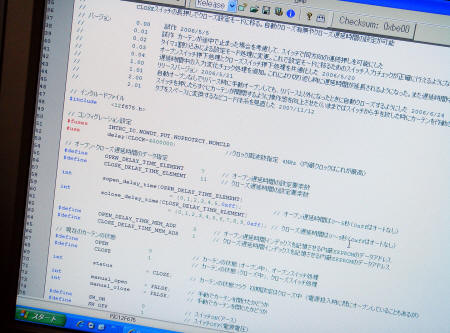
C言語でプログラムを記述しているところ
記述したらCCS社のPIC Cコンパイラ(有償)でコンパイルしてHEXファイルを生成します。MPLAB
IDE上ならF10キーでコンパイラが起動します。
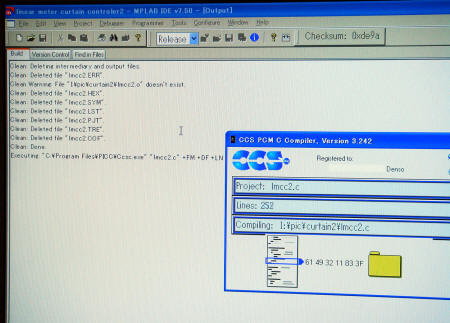
コンパイルしているところ
記述エラーがあるときはエディターで確認し、コンパイルを繰り返します。
秋月電子のPICプログラマーキットをパソコンのUSB端子に接続し、ソケットにPICマイコンをセットし、キットの電源を入れます。

PICプログラマーキットにマイコンをセットする
秋月電子のPICプログラマーを起動し、生成したHEXファイルを指定して、PICマイコンへ書き込みます。
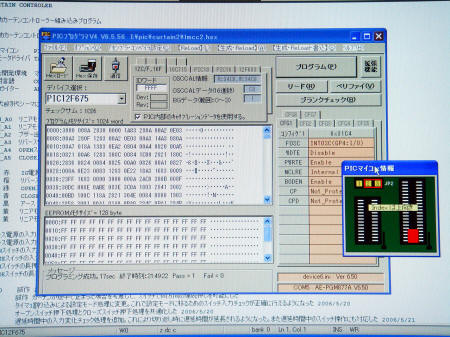
PICプログラマでマイコンにプログラムを書き込む
次にプログラムを書き込んだPICマイコンを製作した基板のICソケットに装着し、動作を確認します(自宅で確認するにはバッテリーや直流安定化電源などの12V電源が必要です)。さまざまな使い方を想定して動作の確認を繰り返します。
ここで不具合がある場合や変更する場合には、エディタでCソースプログラムを訂正し、その後の工程を繰り返し行います。プログラム上の誤りをバグといい、訂正することをデバッグといいます。
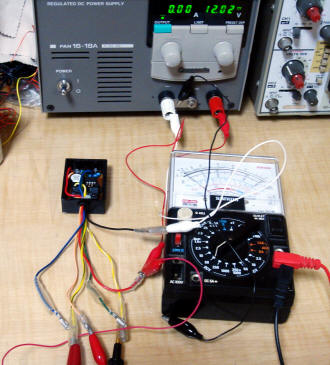
プログラムした通りに動くかテストする
基板にハンダ付けしたブザーの音を聞き取りやすくするために、ケースに穴をあけます。この穴はラベルを貼ると見えなくなります。

ケースに貼るラベルを作成して印刷します。
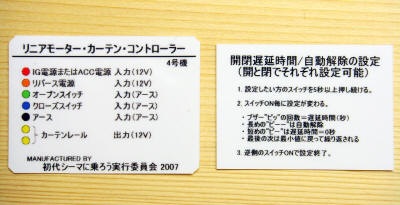
右側の説明書きはケースフタの裏側に貼る
組込プログラムのバージョンがわかるようにバージョン番号を書き込んだシールをPICマイコンに貼りました。

これで製作完了
最後にクルマに取り付けてからさらに確認をします。それでOKなら装着完了となります。
しばらく使ってみて改善点が出てきたら、別のPICマイコンに新しいプログラムを書き込み、それまでのPICマイコンと差し替えるようにすれば、変更・改良が容易に行えます。
前へ | 1
| 2 | 3
上のページへ
関連ページ
基本資料 〜 電動カーテン(リニアモーターカーテン)
追加装備 〜 電動カーテン
追加装備 〜 電動カーテンコントローラの仕様1
追加装備 〜 電動カーテンコントローラの仕様2
追加装備 〜 電動カーテンコントローラ(1号機)
追加装備 〜 電動カーテンコントローラ(2号機)
追加装備 〜 電動カーテンコントローラ(3号機)
追加装備 〜 電動カーテンコントローラ(4号機)
追加装備 〜 電動カーテンコントローラ(4号機)の部品リスト
追加装備 〜 電動カーテンコントローラ(5号機) |